ロボット3Dシミュレーション
設計、プログラミング、導入立上、生産、保守まで一連の業務が集約できます。
特に導入前の構想設計において、レイアウト確認、プログラム作製、サイクルタイム検証、
干渉確認など自動化に必要な事が事前に確認できます。
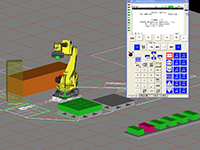
立上時のティーチングの簡素化

オフラインティーチングにより机上でロボットプログラムを作製し現場のロボットへ流し込むことによりスピーディーな立上を可能にします。
重量物積下し、積込みシステム
搬送パレットに積み上げられたワークを次工程へ下ろして行くシミュレーションです。 このシミュレーションでは、ハンドに取り付けてあるワーク検出カメラの検出時間や、仕切板を搬送するロボットの搬送時間、またコンベア上を流れていく時間などを総合的に検証しています。
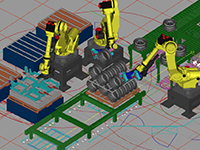
ホイール吊り掛けシステム
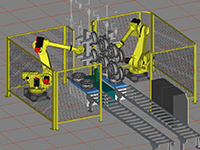
コンベアーで流れてくるワークを、次工程のハンガーへ吊り掛けていくシミュレーションです。 1台のロボットハンドでワークを2個掴み、向かい合うロボットと同調しハンガーへ吊り掛けます。またハンガーコンベアーの動きに合わせて追従します。このシミュレーション結果を基に、実際の現場で稼働しています。
段ボールパレタイズ
段ボールケースのパレタイズシステム検討。上流から払い出し時間なども同時生成しサイクルタイムの検討、積み動作範囲の確認などさまざまな角度から検討します。
走行軸+加工機搬送
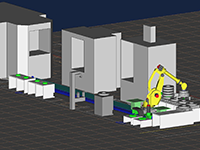
3台の加工機間を走行軸を使い搬送させます。 各加工機の加工時間とを総合的にシミュレーションします。 3次元CAD図がなくても当社で3次元化しレイアウト生成いたします。
マシニングセンターの自動化
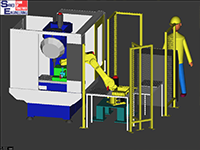
既設、新設にかかわらず自動化の代表的な例です。既設の場合、加工機の大まかな全体外形やワーク外形、また加工処理時間などが分かればシミュレーションが可能です。そのシミュレーション結果を基に、自動化計画が容易に行えます。
コンベアートラッキング
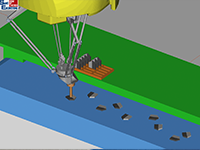
パラレルリンク方式のロボットと、ロボットに備え付けられたビジョンセンサーを使用し、コンベアーで運ばれてくるワークを、ロボット動作を止めることなくワークの流れに追従し運び出します。 シミュレーションにおいては、ビジョンセンサーの認識時間やコンベアーの速度などの動きも生成し、実機通りに確認が出来ます。